

Robotics Evolution — From Research Labs to Walking Wonders — Part II


📖 Hey Thinkers!
In the previous post, the journey of robotics was traced from its earliest beginnings in 400 BC all the way to WABOT‑2 in 1984, revealing how centuries of ideas, mechanisms, and experiments gradually shaped robotics into a formal, systematic field. From ancient automata and mechanical marvels to industrial robots like Unimate and intelligent systems such as Shakey, each era added a new layer of capability and ambition.
By the time WABOT‑2 demonstrated a humanoid robot capable of reading musical scores and playing a keyboard, robotics had clearly matured from scattered inventions into a coherent discipline combining mechanics, electronics, and early artificial intelligence. In this second part, the focus shifts to what happened after 1984—how robotics evolved from experimental prototypes and industrial arms into household devices, planetary explorers, autonomous vehicles, surgical assistants, and highly agile legged robots.
Surgical Precision Arrives (1985)
Just one year after Wabot-2, the PUMA 560 robotic surgical arm performed the first documented robot-assisted surgical procedure. This single event bridged industrial robotics and healthcare—a connection that would eventually transform medicine.
Robotic surgery was first performed by Kwoh in 1985 when a standard industrial (Puma 560) robotic arm was used to place a needle for a brain biopsy while being guided by a computed tomography (CT). The robot was relegated to the role of a traditional stereotactic frame in neurosurgery. However, the company that marketed Puma 560 (Westinghouse Limited), refused to allow the robot to be used for surgery purposes on the basis that it was unsafe, since the industrial robot was designed to be used inside a barrier away from all contact with people.
The MIT Revolution: Fast, Cheap, and Out of Control (1989)

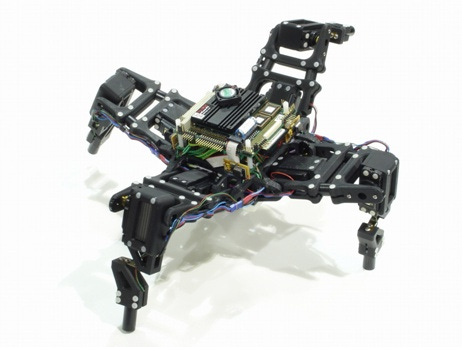
At MIT, Rodney Brooks built Genghis, a six-legged insect-like robot that weighed just 1 kilogram. What made Genghis revolutionary wasn’t its size—it was its architecture.
Brooks pioneered subsumption architecture, proving that complex behaviors (like walking over obstacles) could emerge from simple, decentralized controllers without a central planning system. Each leg had its own sensors and basic behaviors; the “intelligence” emerged from their coordination.
This wasn’t just a robot—it was a philosophy that would influence robotics for decades: intelligence without cognition.
1994 — Carnegie Mellon University’s Dante II

In 1994, Carnegie Mellon University’s eight‑legged walking robot Dante II successfully descended into the crater of Mount Spurr in Alaska to collect volcanic gas samples, marking one of the earliest real‑world demonstrations of robots operating in extreme, hazardous environments.
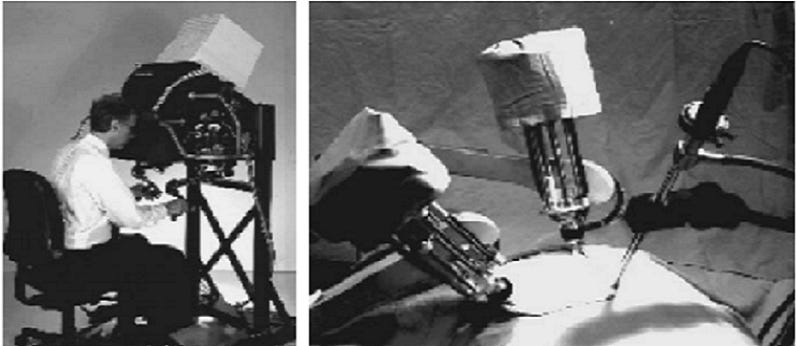
1996 - MIT’s RobotTuna

In 1996, David Barrett, a doctoral student at MIT, built RoboTuna, a biomimetic robotic fish designed to resemble and swim like an Atlantic bluefin tuna, advancing research on highly efficient propulsion systems for autonomous underwater vehicles.
1997 — Sojourner (NASA Mars Pathfinder) 🔴
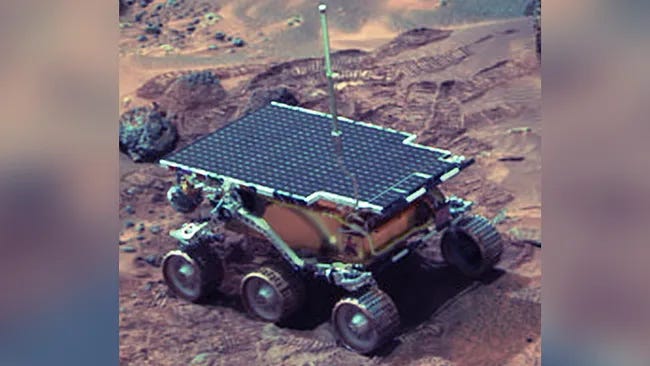
A small rover that reached Mars on July 4, 1997, becoming the first rover of its kind in that mission era—proof robots could explore places humans couldn’t easily go.
The Entertainment Era Begins (1999)

Sony announced AIBO, a robotic dog that could respond to over 100 voice commands. The first models released in Japan sold out in 20 minutes. AIBO proved robots could move beyond industrial applications into consumer consciousness and homes.
🚶 2000: Humanoids learn to move like us (ASIMO)
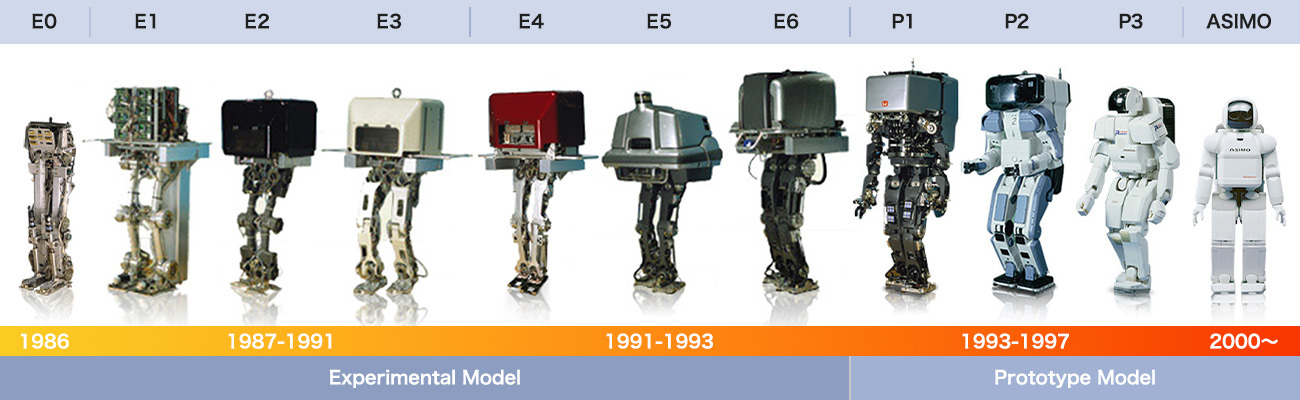
Honda introduced ASIMO in 2000 as a breakthrough humanoid designed around stable, human-like walking and mobility.
Why it mattered: It made “walking robots” feel real—not just a lab curiosity.
Honda’s ASIMO (Advanced Step in Innovative Mobility) became the poster child for humanoid robotics. Standing 130 cm tall and weighing 54 kg, ASIMO featured:
Predicted Movement Control: ASIMO could anticipate movements and shift its center of gravity, enabling smooth direction changes
Multimodal Interaction: Vision systems, voice recognition, and gesture detection
Continuous Evolution: 4 major iterations (2000, 2004, 2005-2007, 2011) with dramatic improvements in speed (walking: 2.7 km/h → running: 9 km/h) and dexterity (26 degrees of freedom → 57)
ASIMO’s 18-year production run demonstrated that robots could achieve refined, human-like mobility. However, after 2018, Honda pivoted away from humanoid entertainment toward practical applications—a harbinger of industry-wide pragmatism.
🏥 2000–2002: Robots enter the operating room (da Vinci)

Intuitive Surgical’s da Vinci system became one of the most famous surgical robotics platforms, with early FDA clearances enabling minimally invasive procedures (Intuitive’s own release documents early clearances for specific procedures).
Why it mattered: Robots weren’t just doing repetitive work—they were helping with precision where millimeters matter.
🧹 2002: The home robot era begins (Roomba)
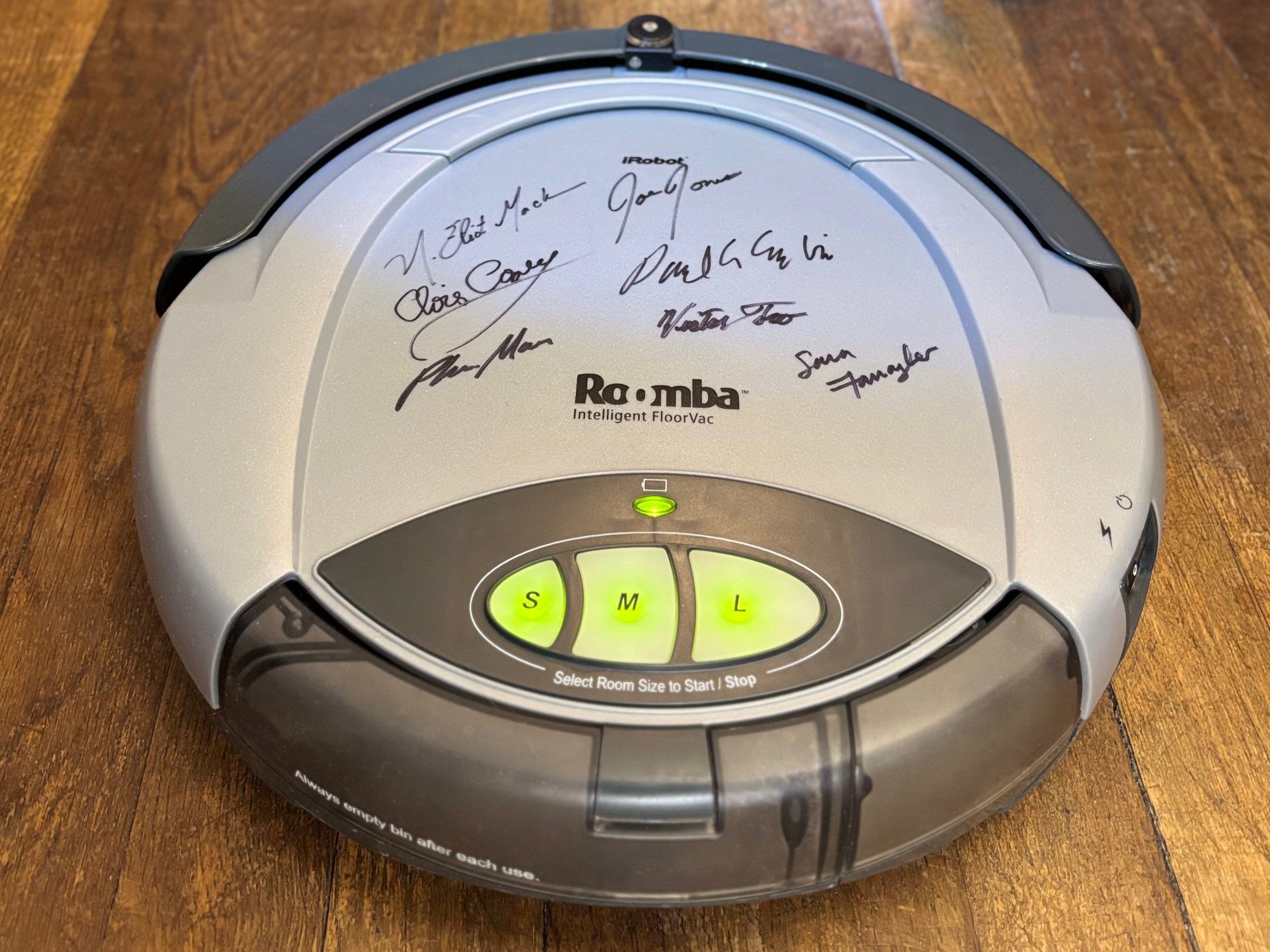
In September 2002, iRobot introduced the Roomba, turning “robot at home” into a real consumer product category.
Why it mattered: Robots became normal—quietly cleaning living rooms instead of starring in sci-fi movies.
2004 — Epson’s Micro Flying Robot

In 2004, Epson introduced the Micro Flying Robot, one of the smallest flying robots ever demonstrated, weighing just 0.35 ounces (around 10 grams) and standing only 2.8 inches (about 70 millimeters) tall. This ultra‑lightweight platform showcased how advances in miniaturization, sensors, and power systems were enabling robotics to shrink from industrial arms and large mobile platforms down to palm‑sized aerial machines.
2004 — Spirit & Opportunity (NASA Mars Exploration Rovers) 🛰️
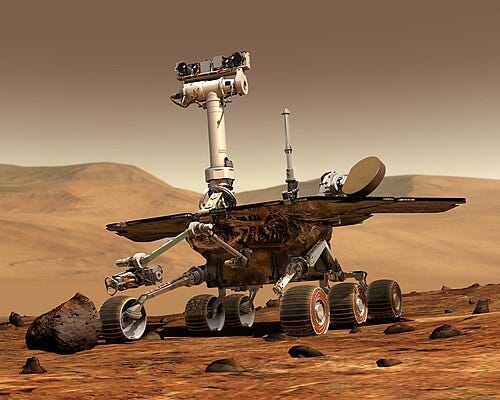
Two tougher, longer-lived Mars robots: NASA lists Spirit landing Jan 3, 2004 and Opportunity landing Jan 24, 2004—a big leap in autonomous exploration and long-duration robotics.
BigDog: Strength in Quadrupeds (2005)

While Honda focused on bipeds, Boston Dynamics (funded by DARPA) introduced BigDog, a four-legged robot designed to carry supplies across rough terrain for soldiers. BigDog was rejected for military use (too noisy), but it proved that legged robots could navigate terrain no wheeled vehicle could handle. The experience positioned Boston Dynamics as the leading robotics moonshot factory.
2005 - Cornell University’s - Self replicate modular robot

In 2005, researchers at Cornell University demonstrated a modular robotic system that could self-replicate by assembling copies of itself from separate building blocks, marking a landmark experiment in programmable, self-reconfiguring robotics. This work showed that robots could, in principle, use simple, identical units to build functional copies, advancing ideas relevant to autonomous construction, space exploration, and future self-maintaining robotic systems.
2006 - Cornell University’s Starfish
In 2006, researchers at Cornell University developed a four‑legged robot nicknamed “Starfish” that could build an internal self‑model of its own body and then relearn how to walk even after sustaining damage, demonstrating a powerful approach to self‑modeling and adaptive behavior in robotics.
The Cobot Revolution (2012)
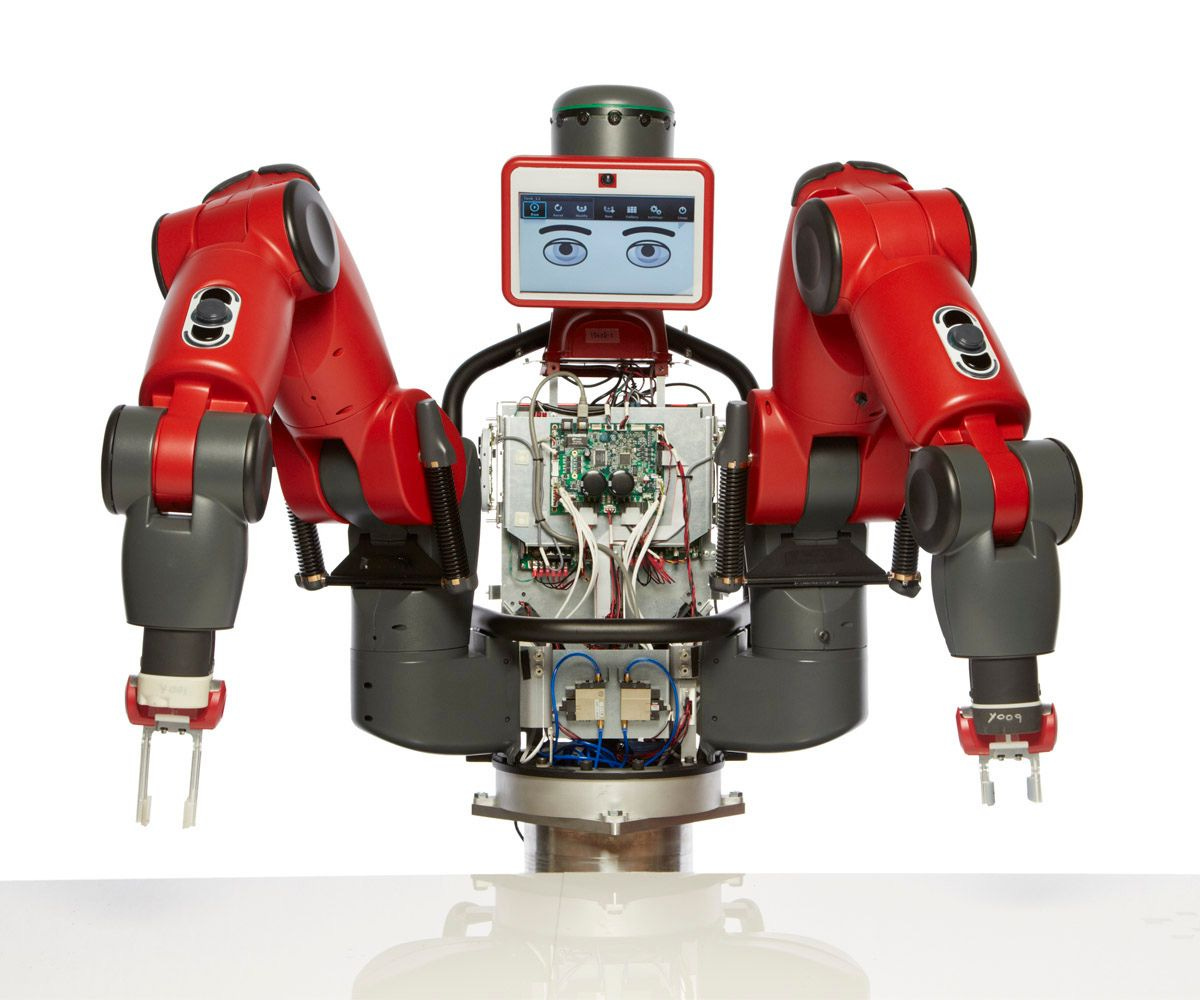
Rethink Robotics unveiled Baxter, a collaborative robot (cobot) designed to work safely alongside humans. Unlike traditional industrial robots (enclosed in cages), Baxter could:
Learn tasks through human demonstration
Sense when humans were nearby
Perform 90% of manual manufacturing tasks that traditional automation couldn’t handle
Baxter didn’t just revolutionize manufacturing—it created an entirely new category. By 2030, collaborative robots are forecast to triple in market value, with studies showing they can cut operational costs by 30%, reduce defects by 25%, and boost capacity without adding labor.
📦 2012: Warehouse robots change shopping forever (Kiva → Amazon Robotics)

Amazon acquired Kiva Systems in 2012, kicking off a major transformation in fulfillment centers—robots bringing shelves/items to human pickers and reshaping delivery speed expectations.
Why it mattered: This is one of the biggest real-world robot deployments ever.
🧗 2013: Disaster-response humanoids get real (Atlas + DARPA)
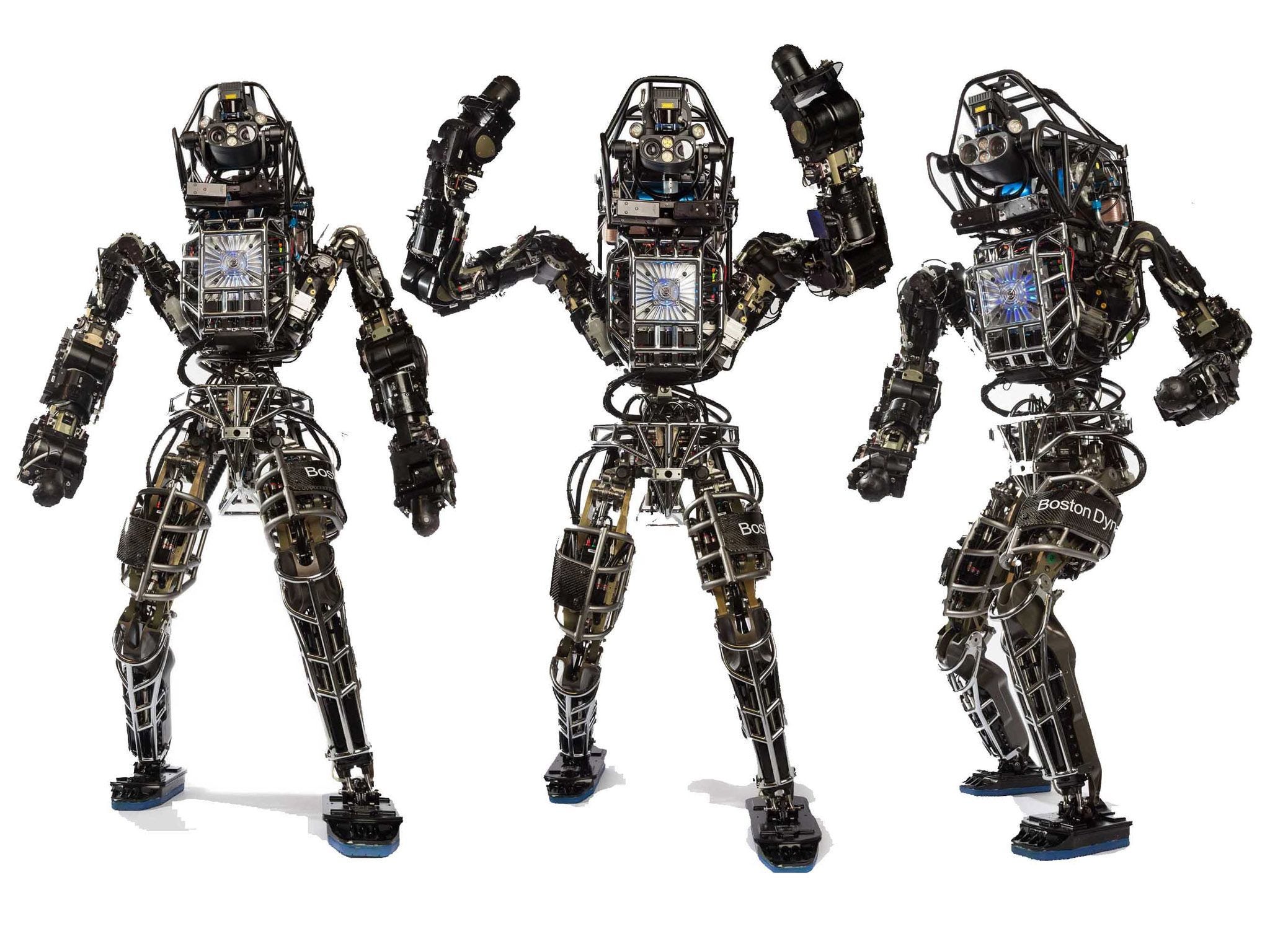
DARPA introduced Atlas (built by Boston Dynamics) as part of efforts to push robots toward disaster-response capabilities.
Why it mattered: Atlas became the symbol of “robots that can handle the messy real world,” not just controlled environments.
🙂 2014: Social robots arrive (Pepper)
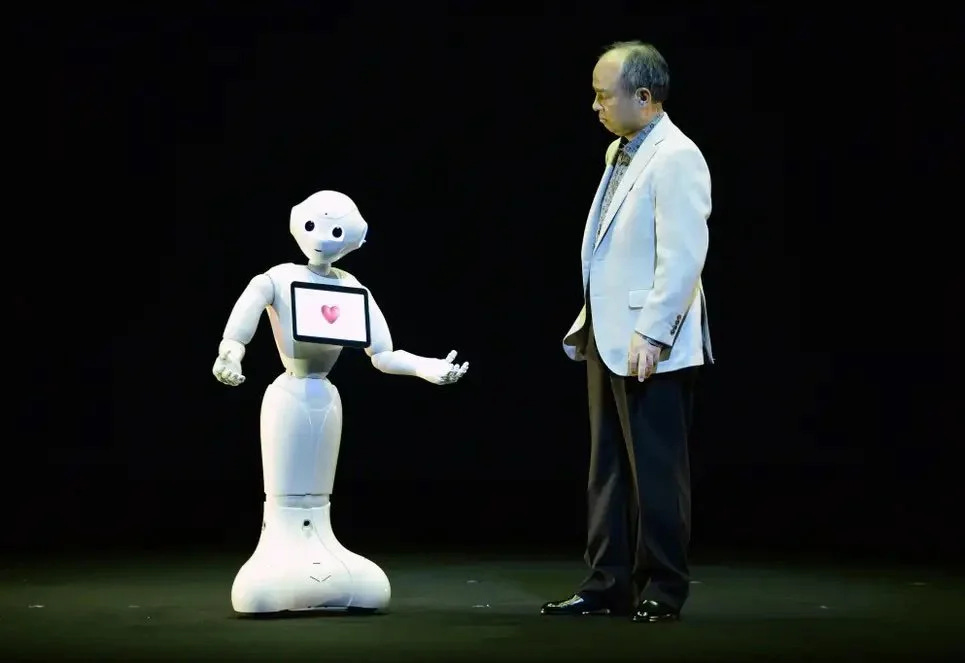
Pepper was officially launched in June 2014 as a semi-humanoid robot designed for interaction, including emotion-oriented features.
Why it mattered: Robots weren’t only tools anymore—they became front-desk greeters, guides, and companions in public spaces.
2016 - Hanson Robotics Sophia
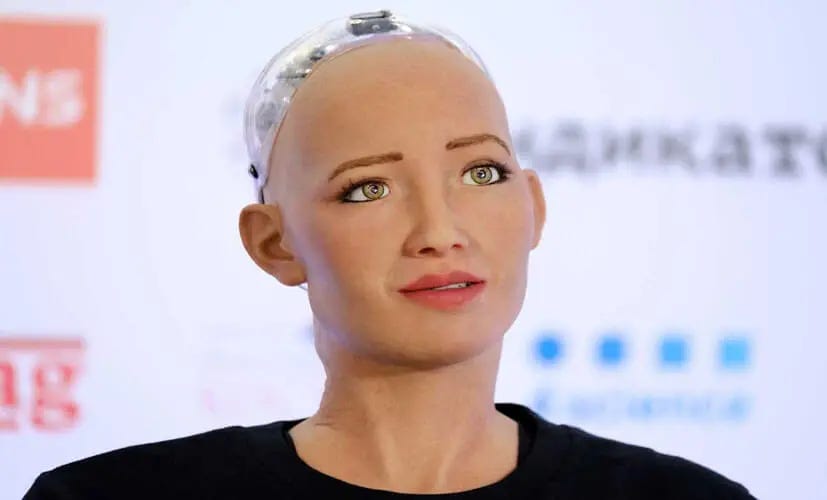
In 2016, Hanson Robotics introduced Sophia, a highly realistic humanoid robot designed to display over 60 human-like facial expressions and engage in natural conversations, later becoming famous as the world’s first “robot citizen” when Saudi Arabia symbolically granted her citizenship in 2017.
🚚 2020: Biped robots move toward real jobs (Digit)
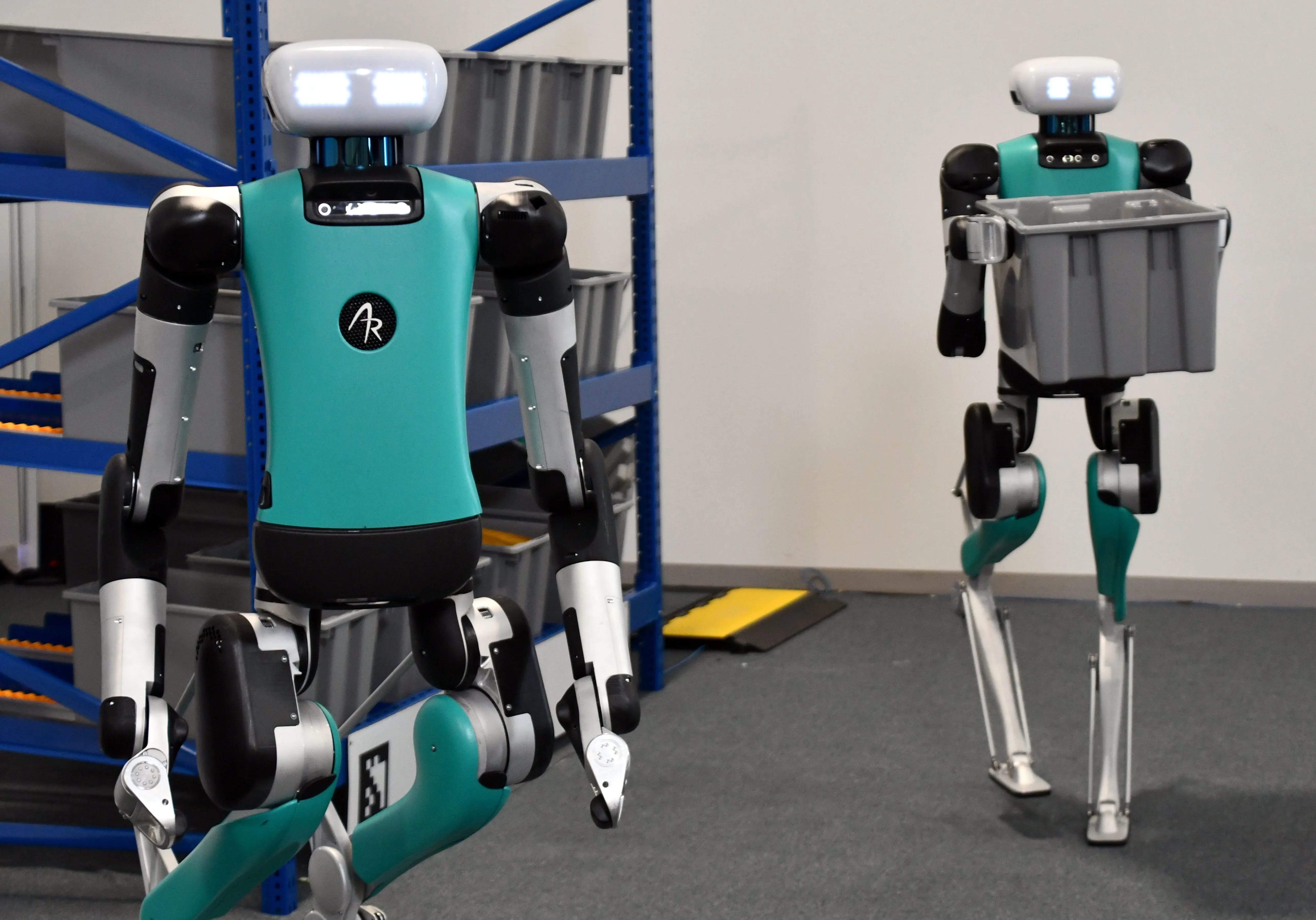
Agility Robotics began pushing Digit toward customer applications—one of the clearest signs that “legged robots for work” were moving beyond demos.
2020 — Spot (Boston Dynamics) 🐕

Boston Dynamics launched commercial sales of Spot on June 16, 2020—a real shift from viral demo videos to businesses buying legged robots for inspections and site monitoring.
🧠 The 2020s: The Humanoid Gold Rush & AI Integration
We are living in robotics’ most exciting era. After 40 years of incremental progress, the 2020s brought a convergence: better AI, cheaper sensors, advanced materials, and clear market demands.
Tesla Optimus: The Consumer Humanoid Bet (2022-Present)
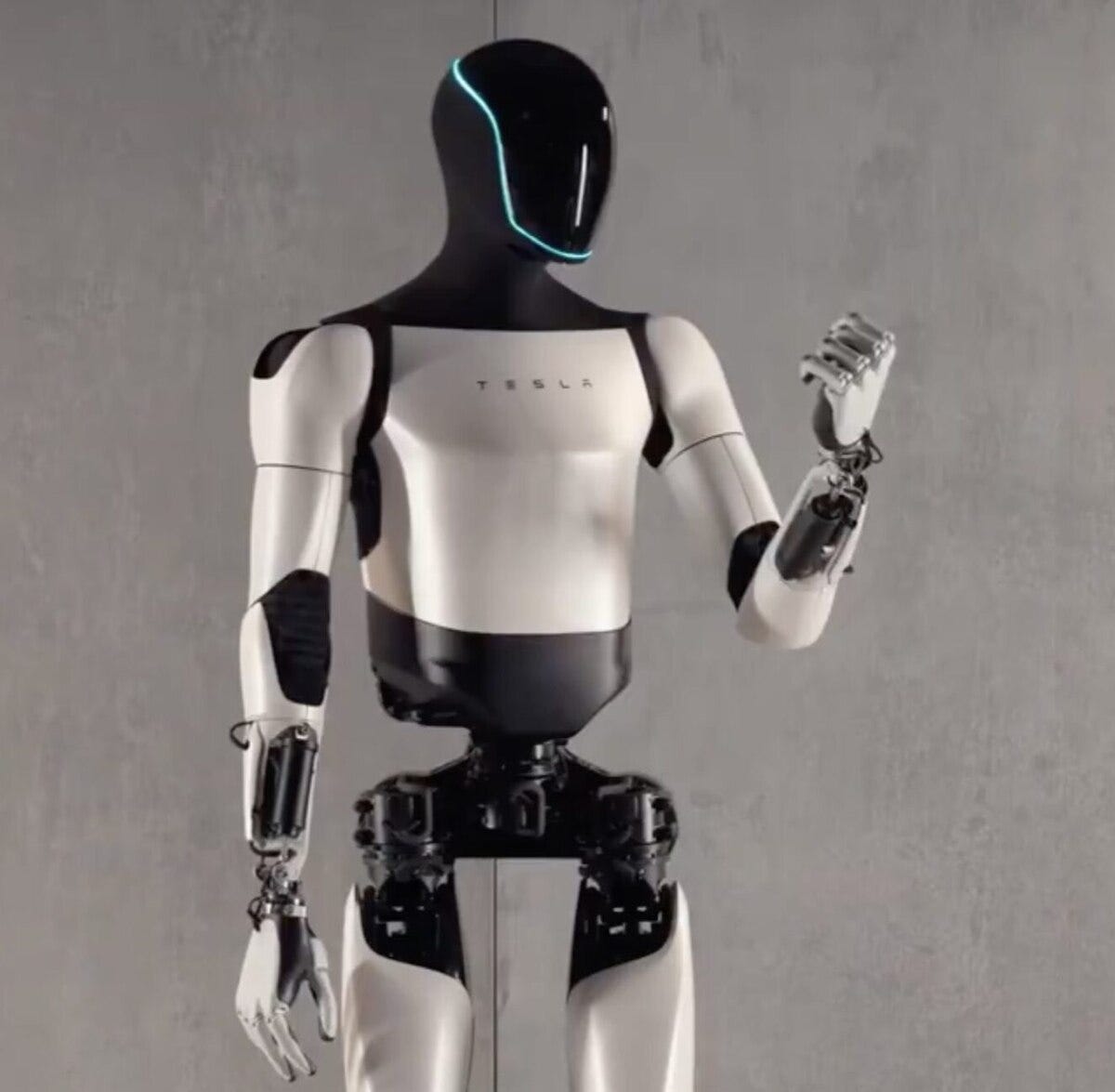
Elon Musk’s vision: a robot cheaper and more capable than a car.
Timeline:
October 2022: Tesla unveiled Optimus Gen 1
December 2023: Optimus Gen 2 could perform complex tasks—sorting colored blocks, holding yoga poses, even dancing
2024-2025: Massive capability jumps
11 degrees of freedom in hands (upgrading to 22)
Running abilities (December 2024)
Independent learning from simulations
Operating on 2.3 kWh battery for nearly all-day functionality
Musk projects 20,000+ Optimus robots in production by end of 2025, with unit costs between $20,000-$30,000. His ultimate vision: robots building robots—self-replicating manufacturing.
Boston Dynamics Goes Electric (April 2024)

After decades of hydraulic dominance, Boston Dynamics retired its hydraulic Atlas and unveiled an electric version—virtually unrecognizable from its predecessor.
Sleek design: Gone are the top-heavy torso and bowed legs
More dexterous: Broader range of motion, higher manipulation capability
Production timeline: Pilot testing at Hyundai facilities in 2025, full production in a few years
The shift to electric motors signals the industry’s maturation: performance that rivals hydraulics with quieter, cleaner operation.
Google DeepMind’s Dexterity Breakthrough (2024)

Google DeepMind introduced ALOHA Unleashed, enabling robots to learn two-armed manipulation from human demonstrations:
Tie shoelaces
Hang shirts
Repair other robots
Insert gears
Clean kitchens
The secret? Diffusion models (the same technology behind Imagen image generation) predict robot actions from noise, learning complex motor skills from video demonstrations. This mirrors how humans learn: from observation and repetition.
Agility Robotics Digit: The Delivery Robot (2023)

Digit represents the opposite philosophy from Optimus: specialized, purposeful design for package delivery in human-centric environments. Digit’s key advantage: it’s already being deployed commercially, proving that focused, working robots matter more than generalist humanoids in near-term markets.
🚀 Wrapping Up 2025: The Humanoid Horizon
As 2025 draws to a close, the robotics journey—from ancient steam-powered pigeons to self-replicating machines and volcano-climbing robots—reveals a clear trajectory: humanoid robots are no longer science fiction; they’re entering the mainstream.
In our nextnewsletter of the year, we’ll spotlight the top humanoid robots of 2025—from Tesla’s Optimus tackling factory tasks, Figure’s AI-powered workforce companions, to Boston Dynamics’ next-gen Atlas performing acrobatic feats that would make Vaucanson’s Duck jealous. These machines blend decades of mechanical ingenuity with modern AI, bringing us closer to companions that walk, work, and interact alongside humans.
Here’s to 2026: May it deliver even more human-like humanoids—safer, smarter, and seamlessly integrated into our world. The ancient dreams of Archytas, Leonardo, and Tesla are becoming our everyday reality.
Stay tuned for the grand finale—see you in the next issue! 🧠🚀
Drop a comment or reply to this newsletter – we’d love to hear your perspectives!
Think Stack 101 — Your Daily Stack of Knowledge, Wisdom, Ideas 🧠

Cut through the noise!
Follow Think Stack 101 on WhatsApp, LinkedIn, Telegram, and Substack for your daily stack of knowledge, wisdom, ideas, and innovation to power up your thinking. 🚀🧠✨
✨ One smart thought a day. Just the boost your mind needs.
This is a genuinely important and thoughtful review of the history of robots. I was especially intrigued by the discussion of AIBO, as I’ve recently been thinking about the role of robots in entertainment—particularly where that boundary lies, including participation in sports or play-oriented activities (I imagined a robot baseball player in one of my recent posts).
Looking ahead to continued improvements in Optimus, I’m also curious how you think about some of the less visible dimensions: energy use for charging, sourcing of the minerals embedded in batteries and components, and what responsible end-of-life for consumer robots should look like. These questions feel increasingly relevant as robots move more decisively into homes.